 wint derde TDRF dronerace in Papierfabriek Nijmegen")

 wint Race der Lage Landen 2")











De motor op een quadcopter is één van de belangrijkste componenten. Een motor in combinatie met een propeller bepaalt namelijk voor een erg groot deel het vlieggedrag van een quadcopter en het is dan ook belangrijk om de juiste motor te kiezen. In dit artikel vertellen wij je alles over quadcoptermotoren zodat je een goede keuze kunt maken bij de aanschaf van een nieuwe motor.
Borstelloze motor
Bij een quadcopter wordt gebruik gemaakt van een borstel- of borstelloze (brushless) motor. De borstelmotor komt niet veel voor in de quadcopterwereld en daarom zullen we ook alleen aan de borstelloze motor aandacht schenken in dit artikel. Een borstelloze motor produceert stuwkracht door middel van een wisselend magnetisch veld tussen de stator en de magneet. Borstelloze motoren zijn minder slijtagegevoelig dan borstelmotoren omdat er geen fysiek contact is tussen twee bewegende componenten. Dit maakt de borstelloze motor dan ook uitstekend geschikt voor de hoogtoerige omstandigheden waar deze in opereert op een quadcopter.
Afmetingen
Veel fabrikanten geven een motor een specifieke naam welke de afmetingen van de motor weergeven. Sommige fabrikanten, zoals T-Motor, geven hun motoren vaak een specifieke naam welke niet direct de afmetingen van de motor aangeven, bijvoorbeeld de F40 Pro III. Echter zijn dergelijke afmetingen vaak wel openbaar te vinden. De afmetingen van een motor worden aangegeven met vier cijfers, als voorbeeld nemen we een Brotherhobby Returner R6 2207 motor. Het getal 2207 geeft de statorhoogte en statordiameter aan. Wat de stator is en welke invloed de afmetingen hiervan hebben zullen we later in dit artikel uitleggen. De eerste twee cijfers geven de statordiameter aan, in dit geval 22 millimeter. De laatste twee cijfers geven de statorhoogte aan, in dit geval 7 millimeter.

CW en CCW
In de beginjaren van de multirotormotoren werd van iedere motor een CW- en CCW-variant ontwikkeld en geproduceerd. Deze lettercombinatie geeft de draairichting van een motor aan. CW staat voor ClockWise, oftewel met de klok mee en CCW voor CounterClockWise, oftewel tegen de klok in. Het is belangrijk dat de juiste motor op de juiste frame-arm wordt gemonteerd. Wordt dit omgedraaid, dan zal de quadcopter niet opstijgen en in het slechtste geval zal de quadcopter onverwachte bewegingen maken. Bij CW en CCW motoren werd gebruik gemaakt van speciale adapters welke een CW- of CCW-schroefdraad hadden. Hierdoor was het risico op loslopen van een propeller dan ook gering. Heden ten dage wordt, om zaken te vergemakkelijken, van iedere motor alleen een CW-variant geproduceerd. Dit omdat propellers nu worden vastgezet met borgmoeren en hierdoor loslopen van een propeller zo goed als niet voorkomt. De draairichting van borstelloze motoren is tegenwoordig softwarematig aan te passen of door middel van het omdraaien van de motordraden.
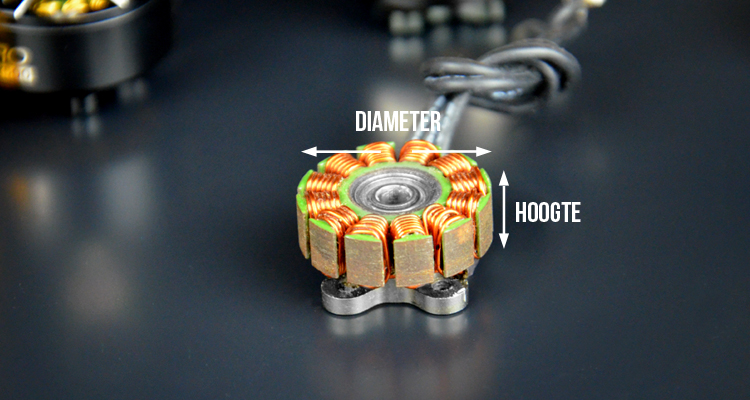
Statorhoogte
De stator is het vaste stilstaande gedeelte van een borstelloze motor. Een stator wordt gevormd door het wikkelen van koperdraad (windings) om een pakket van zeer dunne metaalplaatjes (laminaties). Tussen ieder plaatje zit een zeer dun isolatielaagje. Bij statorhoogte wordt de hoogte van dit pakket gemeten in millimeters. Algemeen kan gesteld worden dat een hogere stator meer stuwkracht produceert bij een hoog toerental dan een lagere stator.
Statorbreedte
De breedte van een stator wordt gemeten op het breedste punt van de stator in millimeters. Als richtlijn kan gesteld worden dat een bredere stator zorgt voor meer koppel in de lage toerentallen en efficiënter is dan een smallere stator.
Laminatiedikte
De stator wordt, zoals hiervoor beschreven, gevormd door een opeenstapeling van zeer dunne metaalplaatjes. De dikte van deze plaatjes bepaalt de hoeveelheid welke er gebruikt kan worden in een stator. Hoe dunner de metaalplaatjes hoe beter omdat er dan meer plaatjes in een stator passen. Een dunner plaatje is beter dan een dikker plaatje omdat dunnere metaalplaatjes helpen het “Eddy Current” fenomeen tegen te gaan. “Eddy Current” is het fenomeen waarbij warmte zich ontwikkelt als het gevolg van het wisselen van het magnetische veld, iets wat op zeer hoge frequentie gebeurd in een borstelloze motor. Hoe dunner de metaalplaatjes, hoe minder motorvermogen er wordt verspeeld aan het genereren van warmte.
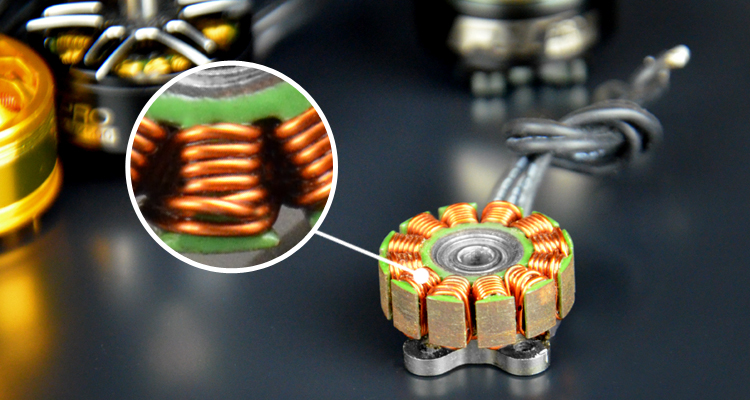
Windingen
De windingen van koperdraad om een stator zien we in twee variaties bij borstelloze motoren: “single stranded” en “multi stranded”. Bij “single stranded” windingen wordt er gebruik gemaakt van één dikke koperdraad. Door de dikte van de draad is een single stranded winding beter bestand tegen hogere temperaturen en dus beter geschikt voor motoren welke werken met 5s of 6s LiPo setups. In het artikel “Alles wat je moeten weten over LiPo’s” kun je alles lezen over de eigenschappen van een LiPo. Bij “multi stranded” windingen wordt er gebruik gemaakt van drie kleinere draden welke samen “één” draad vormen. De dunnere draden zijn minder goed bestand tegen hogere temperaturen en zijn gevoeliger voor fysieke schade. Over het algemeen zijn multi stranded uitgevoerde motoren iets krachtiger omdat het koperdraad dichter bij elkaar kan worden gewonden om de stator dan bij één dikke draad. De hoeveelheid windingen om de stator beïnvloed ook het kV-getal, daarover later meer in dit artikel.
Bell
Samen met de statorbasis vormt de bell de borstelloze motor. Een bell bestaat over het algemeen uit een aluminium behuizing en aan de binnenzijde zijn magneten gelijmd op een metalen ring, de flux ring. De vorm van de flux ring varieert bij motoren omdat fabrikanten experimenteren om zo de best presterende motor te ontwikkelen. De magneten welke aan de binnenzijde van de bell zijn gelijmd hebben een vlakke of halfronde vorm. Wat het voor- en nadeel hiervan is komen we later in dit artikel op terug. Aangezien bij hoge temperaturen lijm vloeibaar wordt en dit tot resultaat heeft dat de magneten “weg kunnen glijden” gebruiken fabrikanten tegenwoordig een naar binnen gevouwen lip aan de onderzijde van de bell om dit probleem te voorkomen.
Magneten
Magneten welke worden gebruikt in brushless motoren worden aangeduid met een cijfer en letter. Het cijfer staat voor de sterkte van het magnetische veld. De bekendste zijn de N52 en N54 magneet. Hoe hoger het nummer, hoe sterker het magnetische veld. De letter staat voor de maximale werktemperatuur van een magneet. Over het algemeen worden bij borstelloze motoren magneten gebruikt met de “H” indicatie. Wanneer je een borstelloze motor met je hand ronddraait voel je de sterkte van de magneten alsof je een soort knop met een vertanding ronddraait. De sterkte van deze “vertanding” wordt ook bepaald door de luchtspleet welke er nog over is tussen de magneten en de stator. Hoe kleiner deze is, hoe sterker het magnetische veld en hoe groter het stroomverbruik van een motor. Om deze luchtspleet zo klein mogelijk te maken gebruiken fabrikanten vaak halfronde magneten, in plaats van vlakke magneten, waardoor deze de vorm van de stator beter volgen. Hierdoor wordt de luchtspleet nog verder verkleint. Sterkere magneten zorgen in theorie voor meer stuwkracht, maar een quadcopter met dergelijke motoren is ook lastiger af te stellen qua PID-waardes. Motoren met zwakkere magneten staan erom bekend dat ze een soepeler vlieggedrag hebben en dat de quadcopter iets makkelijker af te stellen is qua PID-waardes.
KV-getal
Het kV-getal van een motor geeft theoretisch aan hoeveel toeren een motor per Volt produceert. Het kV-getal wordt door een fabrikant altijd opgegeven omdat dit een belangrijke indicatie is voor het te verwachten toerental van een motor.
Omdat het kV-getal gemeten wordt zonder propeller is het ook een theoretische benadering, immers remt een gemonteerde propeller een motor dusdanig af door luchtweerstand dat het maximale toerental veranderd. Ook wordt het kV-getal beïnvloed door de magneten. Een sterker magnetisch veld zorgt namelijk voor een hoger kV-getal.
Lagers
Het gebruik van de juiste lagers in een motor is cruciaal voor de levensduur van een motor. Het lager is immers een gevoelig onderdeel en zal wanneer de motor een object raakt de eerste klap opvangen aangezien dit de zwakste schakel is. In het algemeen wordt gebruik gemaakt van NSK of EZO lagers in moderne motoren. De afmetingen van een lager zijn ook belangrijk omdat dit de stevigheid van een lager in beginsel aangeeft. Immers is een lager met kleinere rolletjes/kogels minder goed bestand tegen fysieke schade. De keuze voor een type lager en de hier bijbehorende afmetingen heeft ook direct invloed op de diameter van de motoras, deze loopt namelijk door het lager.

Motoras
De gebruikte materialen bij productie van een motoras zijn de afgelopen jaren diverse malen veranderd. In de beginperiode werd gebruik gemaakt van een solide aluminium motoras. Echter werd in de zoektocht naar gewichtsbesparing hierna gekozen voor een holle titanium as. Titanium heeft hetzelfde gewicht maar is veel sterker dan aluminium. Echter is het gecentreerd boren van een gat in een titanium motoras een kostbare en tijdrovende aangelegenheid. Tegenwoordig wordt vaak een combinatie gebruikt van een holle titanium as met hierin een stalen binnenas. Dit biedt een maximale sterkte met een gelijksoortig gewicht als de volledige aluminium as.

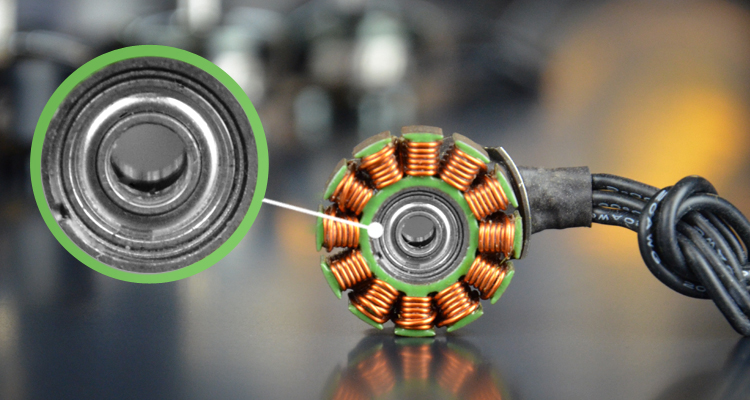
Motorasmontage
Bij het monteren van de bell op de stator worden door fabrikanten drie verschillende methodes gebruikt: de C-clip, de E-clip of een boutje. Voor alle methodes zijn voor- en nadelen te noemen. C-clips en E-clips staan erom bekend dat ze bij het demonteren verbuigen en niet meer bruikbaar zijn. Ook zijn er voorbeelden waarbij C-clips of E-clips tijdens een vlucht van de motoras af springen (vaak veroorzaakt doordat de clip al een keer los is geweest). Echter zien we steeds vaker dat het boutje wordt toegepast. Het boutje is makkelijker bij onderhoud, maar heeft als nadeel dat deze kan strippen of te vast wordt gedraaid waardoor de lagers schade oplopen. Ook word door fabrikanten een techniek toegepast waarbij een rubber O-ring wordt gemonteerd om de motoras tussen de stator en de bell. Wanneer de motor dan een fysieke klap krijgt door een botsing, vangt deze O-ring de eerste impact op. Tevens zorgt deze O-ring ervoor dat het boutje voor de asmontage niet te vast kan worden gedraaid. De O-ring kan namelijk in elkaar worden geduwd, waardoor er altijd voldoende afstand blijft tussen de stator en de bell.

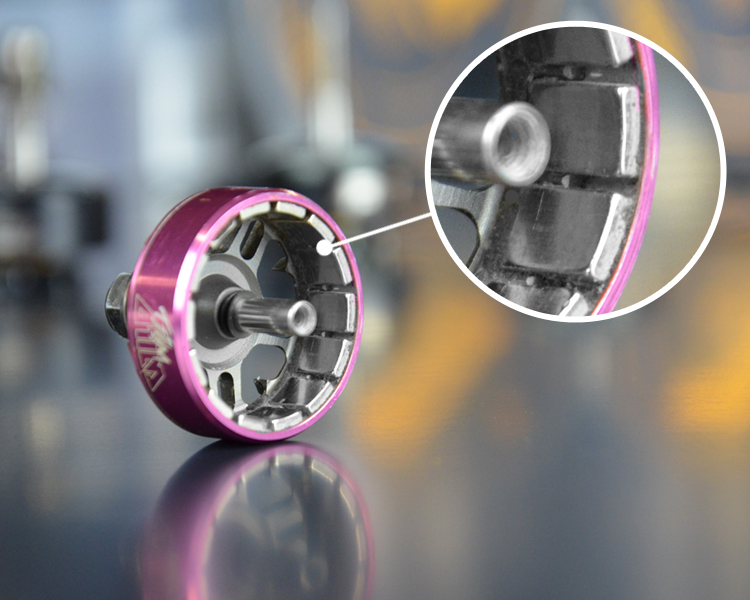
“Naked bottom” en “closed bottom” motoren
Omdat de motoren trendsgewijs steeds groter en krachtiger worden en dus zwaarder, gebruiken fabrikanten diverse mogelijkheden om het gewicht van een motor te beperken. Uiteraard is het weghalen van materiaal de gemakkelijkste en meest effectieve methode om gewicht te besparen en hiermee is dan ook de “naked bottom” motor geboren. De term “naked bottom” verraad al wat dit inhoudt, de onderzijde van de motor is open. Bij een “closed bottom” motor is de onderzijde van de motor gewoon dicht. De laatste tijd zien we dat motorfabrikanten bijna alleen maar naked bottom motoren ontwikkelen en produceren. Het nadeel van een naked bottom motor is dat vuil en andere objecten de motor gemakkelijker kunnen binnendringen en eventueel beschadigen. Echter blijkt uit gebruikservaring dat dit opweegt tegen het positieve gewichtseffect.

POPO-techniek
Lumenier heeft in 2018 een propellermontagetechniek ontwikkeld met de naam “POPO”. Deze afkorting staat voor Pop On, Pop Off”. Dit is een propellermontagetechniek waarbij geen moer of ander bevestigingsmateriaal aan te pas komt. Bij de POPO-techniek wordt gebruikt gemaakt van een as met kogellagers welke in een geschikte propeller “klikt”. Met een simpele druk op de knop welke in de motoras zit bewegen de kogellagers naar binnen en kan de propeller van de motor worden gehaald.
Balanceren
Bij motoren van de bekende merken kun je er vanuit gaan dat deze in de fabriek juist zijn gebalanceerd. Hiervoor wordt gebruik gemaakt van een soort klei welke in zeer kleine hoeveelheden op de binnenzijde van de bell wordt aangebracht waardoor de bell in balans wordt gebracht. Het is mogelijk om met een smartphone en elektrotape een motor zelf enigzins te balanceren. Echter is dit geen methode welke 100% garantie biedt op totale balans.
Gewicht
Het motorgewicht bevindt zich aan de uiterste einden van het frame en hierom voelt een vermeerdering of vermindering exponentieel groter dan in het midden van het frame. Het is daarom ook belangrijk om het gewicht van een motor mee te nemen in de keuze voor de juiste motor. Logischerwijze is een motor met grotere statorafmetingen zwaarder dan een motor met kleinere statorafmetingen. Hoewel motoren trendsgewijs steeds groter en krachtiger worden proberen fabrikanten het gewicht van een motor zoveel mogelijk gelijk te houden zoals eerder beschreven. Om dit te bereiken zijn diverse aspecten van een motor aan te passen, denk aan de gebruikte materialen, asdikte, wel of niet een holle as, naked bottom of closed bottom, enzovoort.

Montage-afstand
Het montagepatroon van motoren is al jaren hetzelfde. Dit heeft er mee te maken dat motoren zo tijdloos toe te passen zijn op alle beschikbare frames. Voor motoren met een statordiameter tussen de 22 en 25 millimeter is dit 16 bij 16 of 16 bij 19 millimeter. Vaak wordt er bij frames gebruik gemaakt van sleufgaten waardoor motoren met deze twee verschillende montage-afstanden uitwisselbaar zijn op alle frames.
Stroomverbruik
Het stroomverbruik (in amperes) is sterk afhankelijk van de propeller welke gebruikt wordt op een motor. In het artikel “Alles wat je moeten weten over propellers” kun je hier alles over lezen. Motoren welke veel stuwkracht leveren hebben vaak ook een hoog stroomverbruik. Bij de keuze voor een motor dien je dan ook goed te kijken naar het stroomverbruik bij 100% gas en een bepaald type propeller. Dit geeft een goede indicatie van de efficiëntie van een motor in combinatie met een bepaald type propeller. Ook word de keuze van een LiPo bepaalt door het stroomverbruik van een motor. De LiPo dient namelijk een C-waarde te hebben welke het gevraagde amperage van een motor in combinatie met een bepaald type propeller kan leveren.

Stuwkracht
Een motor in combinatie met een propeller produceert stuwkracht en de keuze voor de juiste motor is dan ook zeer belangrijk om het juiste vlieggedrag van een quadcopter te krijgen. De richtlijn is dat de vier motoren op een quadcopter minimaal twee keer het totaalgewicht van de gehele quadcopter aan stuwkracht kunnen produceren. Wanneer de motoren te weinig stuwkracht produceren zal de quadcopter moeizaam reageren op de gegeven commando’s. Wanneer de motoren meer dan de benodigde stuwkracht produceren wordt het moeilijk om de quadcopter te besturen, bij iedere beweging zal de quadcopter dan “overreageren”. Bij een freestyle- of race-quadcopter is het aan te raden om te zorgen dat de vier motoren minimaal vijf keer het totaalgewicht van de quadcopter aan stuwkracht produceren.
Keuze motor
De juiste motor kiezen bij een quadcopter setup is door de vele eigenschappen van een motor niet gemakkelijk. Om een motor te kunnen kiezen dien je eerst te weten welke frame-maat je gaat gebruiken en welke propellers. De frame-maat bepaalt namelijk welke propellermaat je kunt gebruiken. Vervolgens bepaalt het type propeller welke motoren er gebruikt kunnen worden.
Er zijn ruwe richtlijnen voor het kiezen van een motormaat en kV-getal. Als uitgangspunt nemen we hier de meest gebruikte serie LiPo, de 4 cels LiPo.

Conclusie
Het kiezen van de juiste motor is niet gemakkelijk en vergt enige moeite. Echter is het resultaat van de juiste motor in combinatie met een propeller een goed reagerende en te besturen quadcopter. Laat je daarom ook adviseren door en schaf je producten aan bij een Nederlandse (web)shop waar men kennis van zaken heeft.







